See how ENSER leverages CAD and simulation tools to enhance product development, reduce time-to-market, and improve engineering precision.
CTA Heading: Design with Confidence Using ENSER’s Simulation Expertise
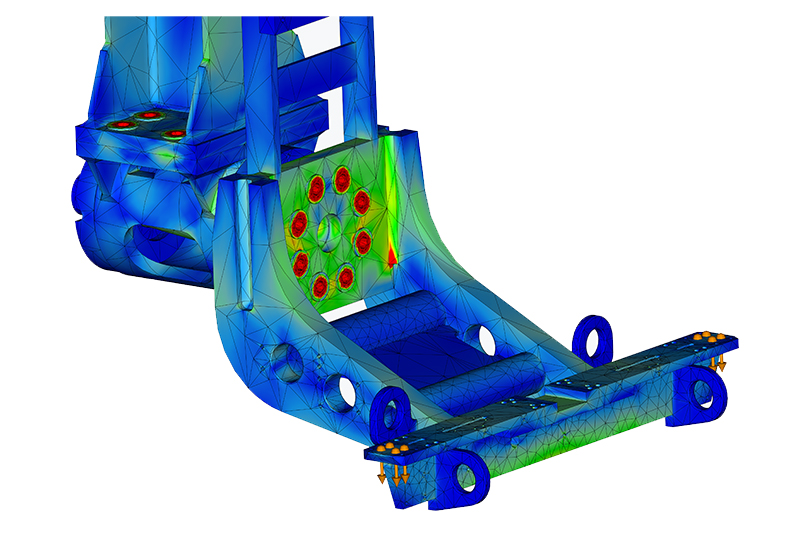
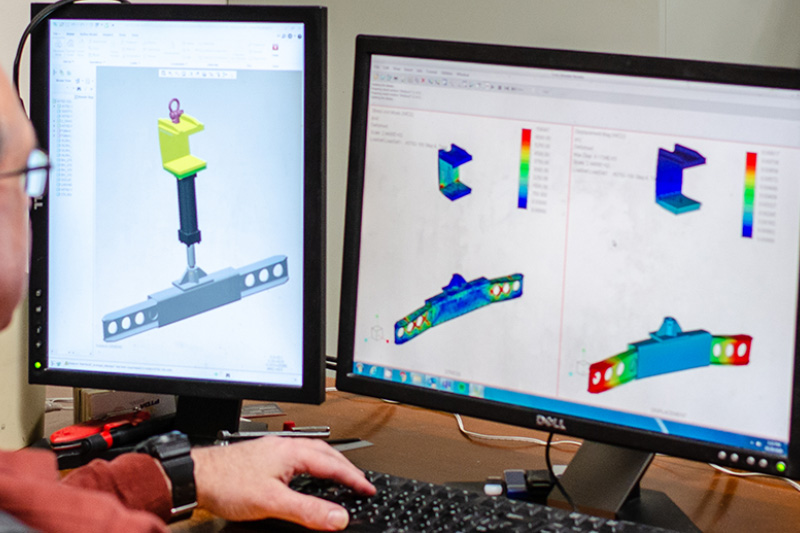
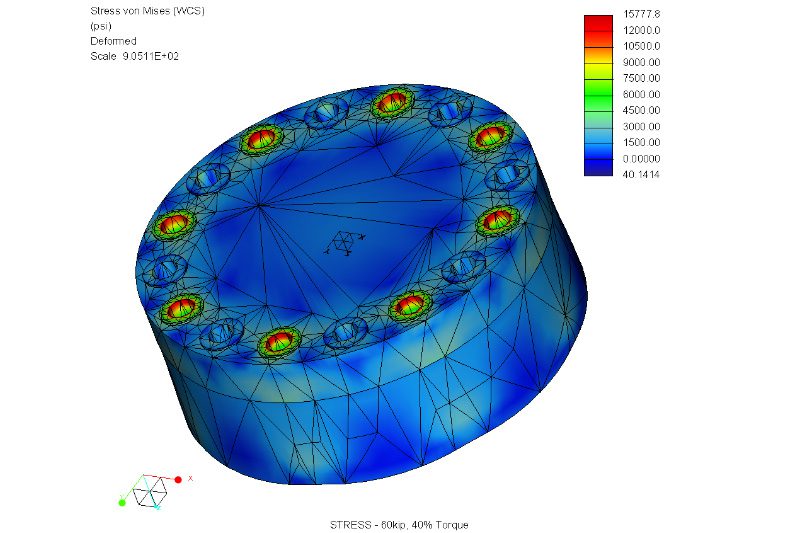
Explore how Finite Element Analysis (FEA) revolutionizes product development in tooling, fixtures, and below the hook devices, saving costs and speeding time to market.
Explore the power of Finite Element Analysis (FEA) modeling for accurate virtual prototyping in mechanical engineering. Learn the steps and benefits in our simplified guide!
Explore how precision tooling, custom fixtures, and innovative designs are reshaping mechanical engineering. Uncover the evolution of efficiency in complex designs with ENSER's tooling and fixtures solutions.
Dive into the world of precision engineering and the power of FEA simulations. Explore how Finite Element Analysis ensures accuracy, optimizes designs, and upholds structural integrity in the pursuit of engineering excellence. Discover the potential of FEA in achieving accurate results for your projects.
ENSER designs and builds custom below the hook lifting devices including spreader beams, c-hooks, pallet lifters, and plate clamps engineered to ASME standards for safe and reliable material handling.
This site uses cookies to improve your user experience. Read More